
During COVID pandemic while I was sitting at home I decided to make a project. I wanted to connect my old Playstation gamepad to my Commodore 64 retro computer.
I found one library for using PS2 gamepad with arduino, so I decided to use it. Here is the link:
Then I tested on arduino with the serial monitor until the gamepad properly works and sends signals to the arduino. I used arduino uno for testing, then I moved to arduino pro mini to save space and amps.
Then I started to work on C64, here is the pinout of the joy port:
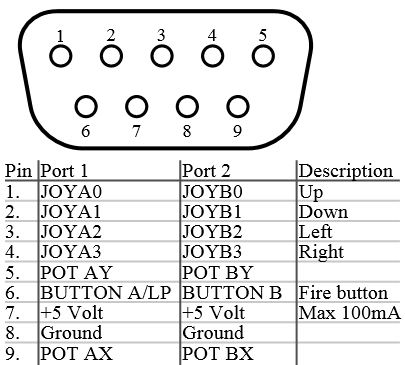
So normally all directions and fire button pins are high (at 5V) so if you pull it to ground the computer senses the motion of the pad.
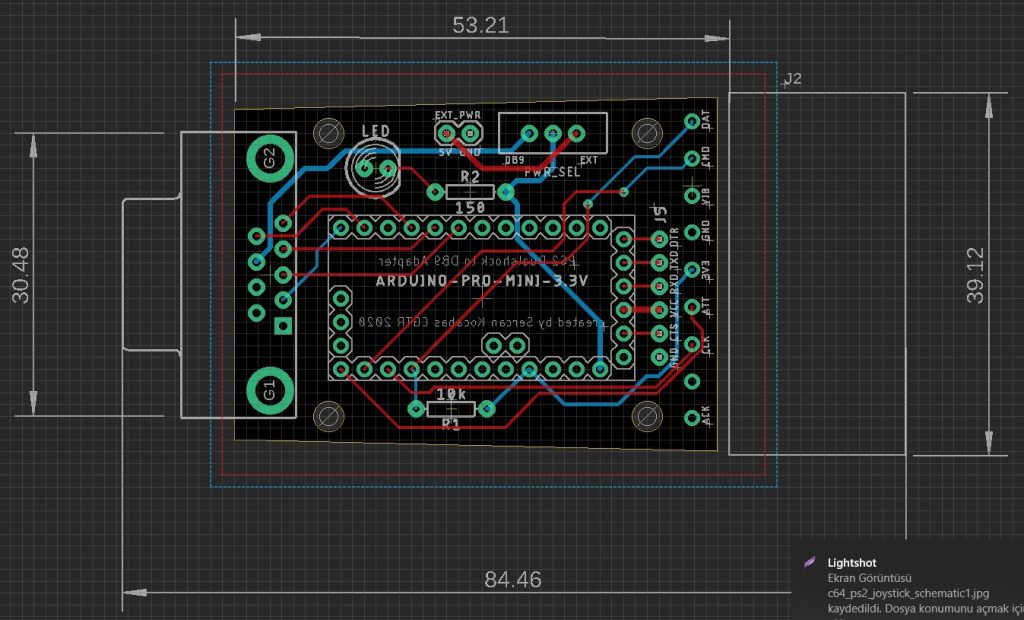
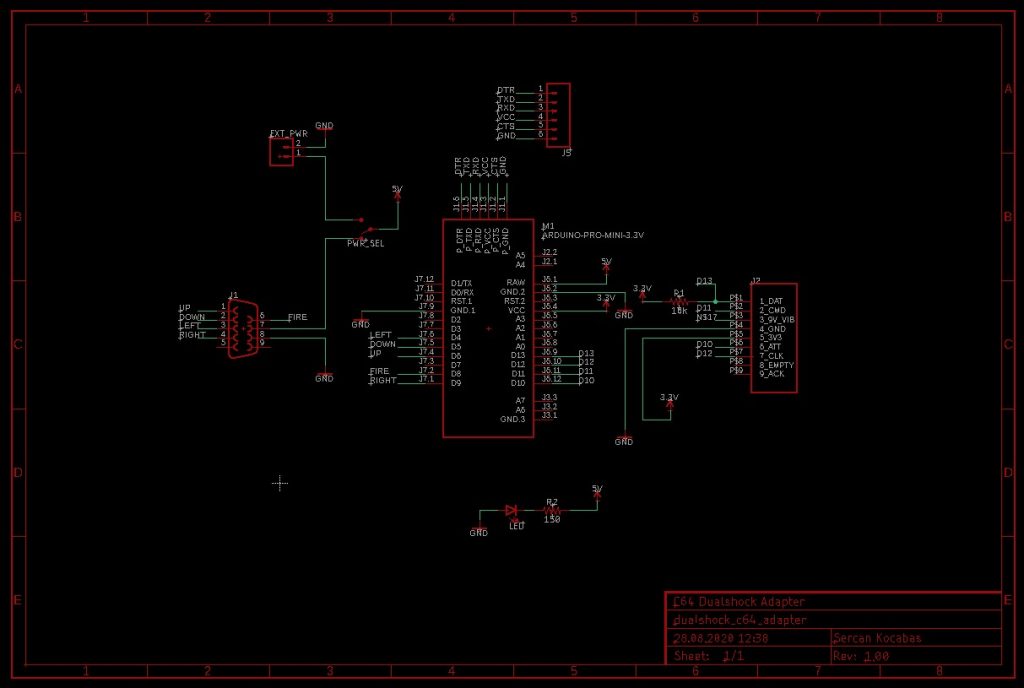
And here are the connections for Rev 2.0 board on PCBWAY:
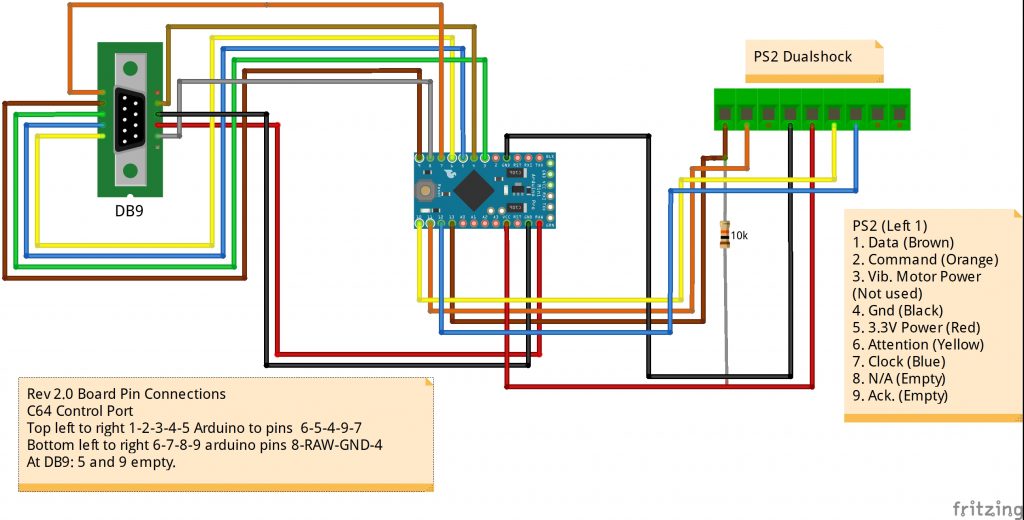
Important : Do not forget a pull-up resistor (10k) between data line and Power(3.3V or 5V)
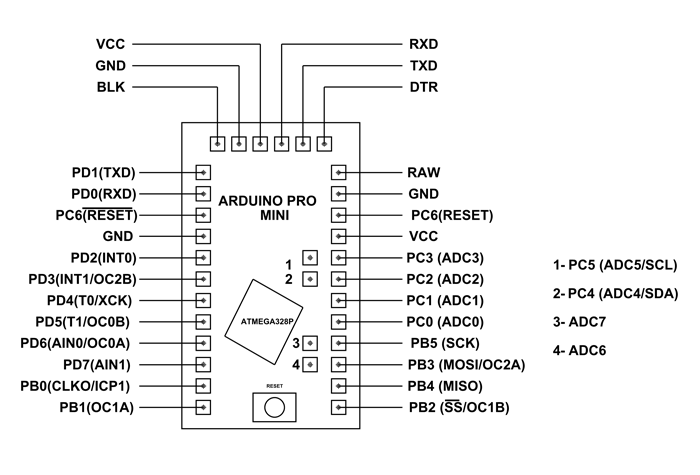
Arduino pro mini general pins:
You can download the code from:
https://github.com/ksercan5/PS2toDB9Adapter
Latest product with a 3D printed box

Update 1:
I now started working on a PCB that you can put the components and plug it in directly to the joystick port. I will share the link when I complete the design. Work in progress…


Update: Added stl files to my github page, please check